





隨著機(jī)器人(Robot)、無人機(jī)(Drone)、無人搬運(yùn)車、自動駕駛等新概念系統(tǒng)的興起,連帶刺激測距與避障(Obstacle Avoidance)技術(shù)需求。



其中測距為避障的基礎(chǔ),并有多種技術(shù)可以實(shí)現(xiàn)測距,包含無線射頻(Radio Frequency;RF)、超音波(Ultrasonic)、紅外線(Infrared)以及激光/雷射(Laser)等。這些技術(shù)各有其優(yōu)缺點(diǎn),且成本也有差異性。
其中,紅外線與激光屬光電半導(dǎo)體技術(shù),分別運(yùn)用紅外線二極管(Infrared Light-Emitting Diode;IR LED)及激光二極管(Laser Diode;LD)的發(fā)波,而后接收回波來辨識物體的距離,紅外線技術(shù)適合短距離運(yùn)用,激光技術(shù)則適合長距離范疇。另外,常見的避障技術(shù)還有無線射頻、超音波技術(shù)等,它們則常見于汽車領(lǐng)域應(yīng)用。
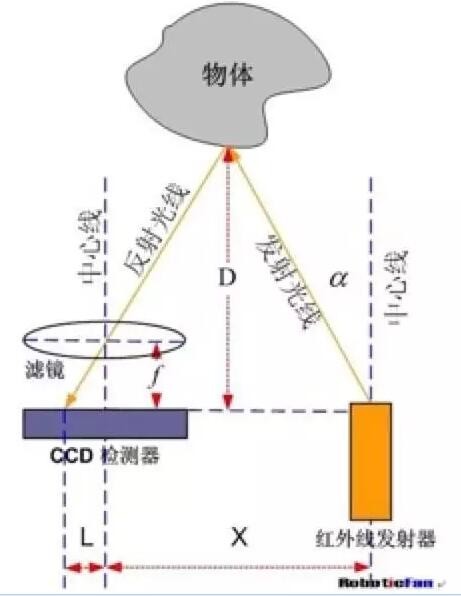
紅外線角度測距原理
一般的紅外測距都是采用三角測距的原理。紅外發(fā)射器按照一定角度發(fā)射紅外光束,遇到物體之后,光會反向回來,檢測到反射光之后,通過結(jié)構(gòu)上的幾何三角關(guān)系,就可以計(jì)算出物體距離D。
當(dāng)D的距離足夠近的時候,上圖中L值會相當(dāng)大,如果超過CCD的探測范圍,這時,雖然物體很近,但是傳感器反而看不到了。當(dāng)物體距離D很大時,L值就會很小,測量精度會變差。因此,常見的紅外傳感器測量距離都比較近。另外,對于透明的或者近似黑體的物體,紅外傳感器是無法檢測距離的。
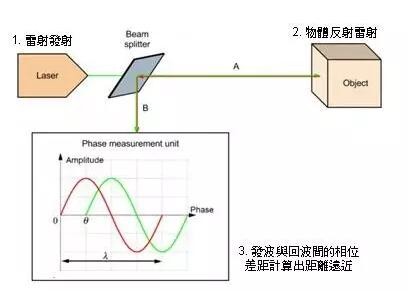
激光相位差測距原理示意圖
常見的激光雷達(dá)則是基于飛行時間的(ToF,time of flight),通過測量激光的飛行時間來進(jìn)行測距d=ct/2,其中d是距離,c是光速,t是從發(fā)射到接收的時間間隔。激光雷達(dá)包括發(fā)射器和接收器 ,發(fā)射器用激光照射目標(biāo),接收器接收反向回的光波。
對飛行時間的測量也有不同的方法,比如使用脈沖激光;另一種發(fā)射調(diào)頻后的連續(xù)激光波,通過測量接收到的反射波之間的差頻來測量時間。
比較簡單的方案是測量反射光的相移,傳感器以已知的頻率發(fā)射一定幅度的調(diào)制光,并測量發(fā)射和反向信號之間的相移,如下圖三。調(diào)制信號的波長為lamda=c/f,其中c是光速,f是調(diào)制頻率,測量到發(fā)射和反射光束之間的相移差theta之后,距離可由lamda*theta/4pi計(jì)算得到,如下圖四。
激光雷達(dá)的測量距離可以達(dá)到幾十米甚至上百米,角度分辨率高,通??梢赃_(dá)到零點(diǎn)幾度,測距的精度也高。但測量距離的置信度會反比于接收信號幅度的平方,因此,黑體或者遠(yuǎn)距離的物體距離測量不會像光亮的、近距離的物體那么好的估計(jì)。并且,對于透明材料,比如玻璃,激光雷達(dá)就無能為力了。此外,由于結(jié)構(gòu)的復(fù)雜、器件成本高,激光雷達(dá)的成本也很高。
調(diào)研機(jī)構(gòu)認(rèn)為,激光測距技術(shù)因價(jià)格較高,在室內(nèi)慢速移動的系統(tǒng)上,較難取代紅外線或超音波技術(shù),但激光的精確度高、可偵測的距離遠(yuǎn)等特性,則適用于戶外高速移動系統(tǒng),如高速行車、無人機(jī)飛行等。
短期內(nèi)業(yè)者偏向采取折衷方式,即各類系統(tǒng)使用多組或混用各種測距技術(shù),確保偵測的可靠度,并維持偵測系統(tǒng)價(jià)格不致于過高,以提升市場普及度。
轉(zhuǎn)載請注明出處。

 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀














 關(guān)注我們
關(guān)注我們